

協働ロボット遠隔操作システムの開発
| 公開日 | 2022-04-27 | ||||
|---|---|---|---|---|---|
| 大分類 | ナノ・材料・ものづくり・情報通信技術 | 中分類 | 機械・情報・通信・ソフトウエア・粉末冶金 | 小分類 | - |
| 研究者 |
《研究代表者》研究員 大竹 匡 |
||||
| 所属 |
秋田県産業技術センター 先進プロセス開発部 スマートものづくり技術グループ |
||||
新型コロナウイルス感染症(COVID-19)の拡大を契機にあらゆる産業分野で、「遠隔」「非接触」「非対面」を実現することが求められている等、労働環境の多様性が高まっており、ICTを活用した遠隔監視や遠隔操作技術などの導入が求められています。また、協働ロボットは、安全柵無しで稼働させることができ、人と協調することを目的としたロボットであり、幅広い産業分野への応用が期待されています。
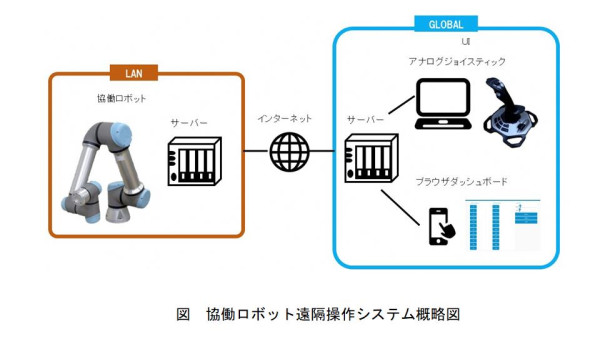
当研究グループではオープンソースを用いて、協働ロボット遠隔操作システムの開発を行いました。図に開発した協働ロボット遠隔操作システムの概略図を示します。スマートフォンやスマートグラスなどを用いた遠隔操作を想定し、 JavaScriptをベースとしたビジュアルプログラミング開発ツールでシステム構築を行いました。操作システムはアナログジョイスティックおよびブラウザダッシュボードを用いた操作系をそれぞれ開発し、関節空間準拠動作やデカルト空間準拠動作について、操作性を考慮したユーザインターフェースを構築しました。
協働ロボット遠隔操作システムの開発を通じて獲得したマニピュレータ制御技術、ICT技術、UI構築技術などの各要素技術について、県内企業に技術普及し、人材育成に努めていきたいと考えております。
これらの技術に関心のある企業との共同研究を希望します。
研究者
秋田県産業技術センター 先進プロセス開発部 スマートものづくり技術グループ 研究員 大竹 匡
秋田県産業技術センター 先進プロセス開発部 スマートものづくり技術グループ 研究員 瀬川 侑
秋田県産業技術センター 先進プロセス開発部 スマートものづくり技術グループ 主任研究員 小松 和三
↓写真はクリックすると大きくなります
問い合わせ先
秋田産学官ネットワーク
E-mail:collabo-akita@mail2.pref.akita.jp