

高伸縮比マニピュレータ(伸縮比が大きく、かつ過負荷に対して破損しにくい、コンベックステープによる伸縮機構)
| 公開日 | 2023-12-19 | ||||
|---|---|---|---|---|---|
| 大分類 | グリーンイノベーション・ライフイノベーション・ナノ・材料・ものづくり・情報通信技術・その他 | 中分類 | 電子部品・デバイスの実装・成形加工・熱処理・塗装・蒸着・プレス加工・ロボット・組込みソフトウエア・金型・鍛造・切削加工・溶接・めっき・溶射・動力伝達・部材の締結・繊維加工 | 小分類 | - |
| 研究者 |
教授 齋藤 敬 |
||||
| 所属 |
秋田県立大学システム 科学技術学部 知能メカトロニクス学科 |
||||
福祉・生活支援メカトロニクスにおいて、屋内外でも使用可能な、粗雑かつ過酷な用途に耐える運搬・作業機構開発は遅れています。
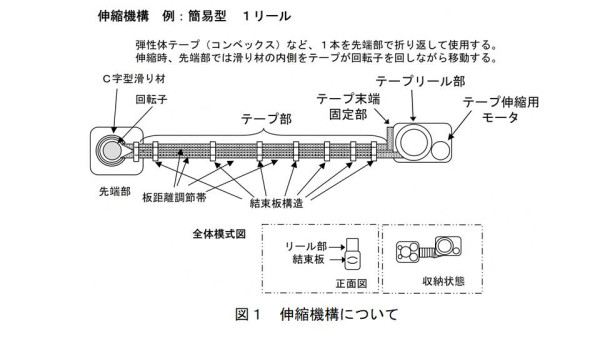
これに対し私たちは十倍を超える伸縮比を達成可能な、軽量伸縮棒状構造体の開発を進めています。これは過負荷に対しては可逆的に屈曲可能となるよう、弾性体テープを束ねた構造体です。
・目指す場所までまっすぐ伸ばせ、過負荷に対しては復旧可能に曲がります。
・確実な動力伝達機構により、力強い押し引きが可能です。
・特殊な形状のテープを使用する既存品と異なり、単なる帯なので廉価です。
・束ねることで、より強度の必要な用途にも対応できます。
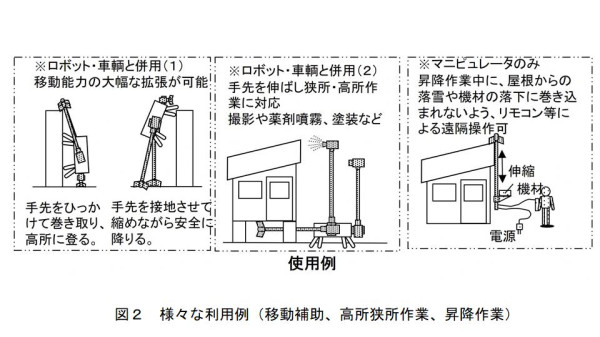
想定利用者:ロボット事業者、介護・福祉施設関係者、危険物取扱事業者など
想定用途 :ロボット昇降機構 、ロボット腕、カメラ等昇降機構、伸縮する杖、リフト機構、後付け型電動カーテン、電動扉/門扉など
本研究で得られた成果に基づき、実用化に向けた企業への技術指導が可能です。
研究者
秋田県立大学システム科学技術学部知能メカトロニクス学科 教授 齋藤 敬
↓図はクリックすると大きくなります
問い合わせ先
秋田産学官ネットワーク
E-mail:collabo-akita@mail2.pref.akita.jp