

モータ駆動システムの高性能化のための制御系およびモータ・インバータの統合制御に関する研究
| 公開日 | 2023-12-19 | ||||
|---|---|---|---|---|---|
| 大分類 | グリーンイノベーション・ナノ・材料・ものづくり | 中分類 | エレクトロ二クス・ロボット・位置決め・モータ制御・エネルギー | 小分類 | - |
| 研究者 |
助教 小林 勇斗 |
||||
| 所属 |
秋田工業高等専門学校創造システム工学科 電気・電子・情報系 |
||||
今日の電力化社会に伴い、使いやすい動力としてあらゆる用途でモータが利用されており、モータに要求する仕様は用途によって様々です。例えば産業ロボットの場合、高速高精度なモータ制御で作業効率を改善したい、車載向けモータでは他の電装系へ悪影響が出ないようモータのノイズを低減したい、などの要求です。この要求に対し、センサの高性能化やフィルタの追加など、物理的に対策をとることがシンプルなのですがコスト増大やシステムの複雑化を免れません。
またモータを駆動するためには、モータに電力を供給するインバータとセットで使用します。このモータ制御とインバータ制御は独立に議論されることが普通です。しかしながら実際はインバータへの入力とモータの出力、すなわちモータ駆動システムの性能が重要です。またインバータ入力は制御器が生成する電圧指令であり、制御器は制御対象の特性を考慮して構成されます。エンドエフェクタ制御など減速機を搭載する場合、共振現象により振動が発生します。
そこで本研究では、減速機の剛性を考慮する二慣性共振系の制御系設計、およびインバータ制御・モータ制御を統合することで性能を最大限引き出す制御、この2つに関して開発研究します。モータの用途が様々のため対象は多岐に渡りますが、「制御」を軸に下記研究などを想定しています。
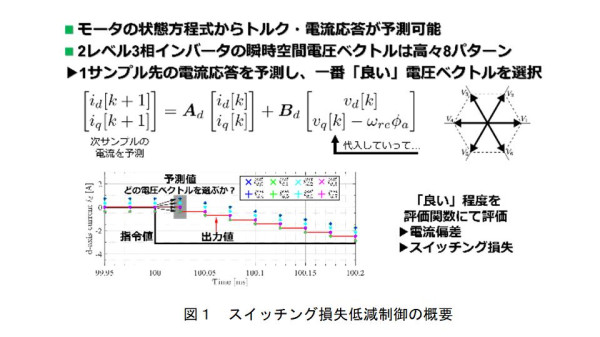
1. インバータ小型化に向けたスイッチング損失を減らしつつ所望のモータトルクを達成する制御研究
2. モータ駆動システムの低ノイズ化・運転領域拡大のための制御系設計に関する検討
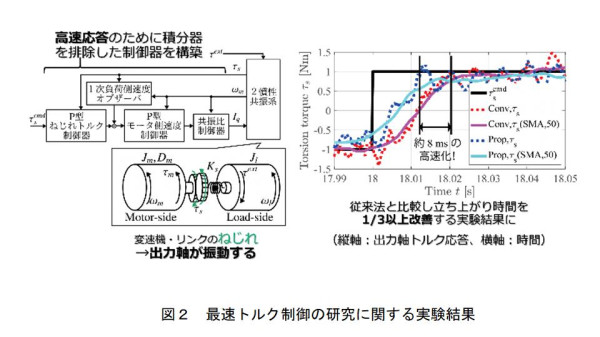
3. 出力軸の機械特性を考慮した最速トルク制御の研究
本研究は同期機・誘導機をはじめとしたモータ駆動システムの高性能化について、ご興味がある企業様・研究機関様との共同研究を希望いたします。
研究者
秋田工業高等専門学校 創造システム工学科 電気・電子・情報系 助教 小林 勇斗
↓図はクリックすると大きくなります
問い合わせ先
秋田産学官ネットワーク事務局
E-mail:collabo-akita@mail2.pref.akita.jp